fused_rotary_position_embedding反向修复
fused_rotary_position_embedding反向修复
fused_rotary_position_embedding API在use_neox_rotary_style为False时,反向传播计算逻辑存在错误。
##Paddle 目前kernel中的反向计算逻辑
def paddle_backward_rotary_pos_emb(dL_dxprime, cos, sin):
return dL_dxprime * cos - rotate_half(dL_dxprime) * sin
##正确的反向计算逻辑,可以和torch自动微分的结果对齐
def correct_backward_rotary_pos_emb(dL_dxprime, cos, sin):
return dL_dxprime * cos - rotate_half(dL_dxprime * sin)
paddle kernel代码
template <typename T, typename MPType, int VecSize = 2>
__device__ __forceinline__ void rotate_half(phi::Array<const T*, 3> ins_data,
int num_inputs,
int64_t head_dim,
int64_t index,
int sign,//-1表示反向
MPType* sin_value,
MPType* cos_value,
phi::Array<T*, 3> outs_data) {
MPType result[VecSize];
T store[VecSize];
using VecType = phi::AlignedVector<T, VecSize>;
constexpr int kVectorsPerThread = VecSize / 2;
int64_t stride_r = head_dim / 2;
#pragma unroll
for (int iter = 0; iter < 3; iter++) {
if (iter >= num_inputs) break;
// get value_index and rotate_half_index
int64_t index_v = index;
int64_t index_r =
(index % head_dim) < stride_r ? (index + stride_r) : (index - stride_r);
MPType sign_r = (index % head_dim) < stride_r ? static_cast<MPType>(-1)
: static_cast<MPType>(1);
const T* input_v = ins_data[iter] + index_v;
const T* input_r = ins_data[iter] + index_r;
VecType* out = reinterpret_cast<VecType*>(outs_data[iter] + index);
#pragma unroll
for (int nx = 0; nx < VecSize; ++nx) {
MPType p0 = static_cast<MPType>(input_v[nx]);
MPType p1 = static_cast<MPType>(input_r[nx]);
result[nx] = cos_value[nx] * p0 + sign * sign_r * sin_value[nx] * p1;
store[nx] = static_cast<T>(result[nx]);
}
out[0] = *(reinterpret_cast<VecType*>(store));
}
}
复现代码
import paddle
import torch
import numpy as np
import unittest
from paddle.utils import map_structure
try:
from paddle.fluid.framework import in_dygraph_mode
except:
from paddle.base.framework import in_dygraph_mode
TOLERANCE = {
"float32": {"atol": 1e-6, "rtol": 1e-6},
"float16": {"atol": 1e-3, "rtol": 1e-3},
"bfloat16": {"atol": 1e-2, "rtol": 1e-2},
}
'''
TOLERANCE = {
"float32": {"atol": 0, "rtol": 1e-6},
"float16": {"atol": 0, "rtol": 1e-5},
"bfloat16": {"atol": 0, "rtol": 1e-5},
}
'''
def convert_dtype_to_torch_type(dtype):
import torch
if dtype in ["float32", np.float32]:
return torch.float32
elif dtype in ['float16', np.float16]:
return torch.float16
elif dtype in ['bfloat16', np.uint16]:
return torch.bfloat16
elif dtype in ['uint8', np.uint8]:
return torch.uint8
elif dtype in ['int32', np.int32]:
return torch.int32
elif dtype in ['int64', np.int64]:
return torch.int64
elif dtype in ['bool']:
return torch.bool
elif dtype in ['complex64', np.complex64]:
return torch.complex64
else:
raise ValueError(f'Unsupport dtype: {dtype}')
def grad(outputs, inputs, grad_outputs=None, no_grad_vars=None):
if in_dygraph_mode():
return paddle.grad(outputs, inputs, grad_outputs=grad_outputs, no_grad_vars=no_grad_vars)
else:
return paddle.static.gradients(outputs, inputs, target_gradients=grad_outputs, no_grad_set=no_grad_vars)
def np_assert_accuracy(
np_a,
np_b,
atol,
rtol,
dtype,
version_a,
version_b,
eager_or_static_mode,
fwd_or_bkd,
api,
):
max_atol_idx = np.argmax(np.abs(np_a - np_b))
np_a_flatten = np_a.flatten()
np_b_flatten = np_b.flatten()
sub_res = np_a_flatten - np_b_flatten
nonzero_idx = np.nonzero(np_b_flatten)
sub_res = sub_res.take(nonzero_idx)
np_b_flatten_nonzero = np_b_flatten.take(nonzero_idx).flatten()
np_a_flatten_nonzero = np_a_flatten.take(nonzero_idx).flatten()
if sub_res.size ==0:
max_rtol_idx = 0
else:
max_rtol_idx = np.argmax(np.abs(sub_res / np_b_flatten_nonzero))
np.testing.assert_allclose(
np_a,
np_b,
rtol,
atol,
err_msg=(
'{api} {eager_or_static_mode} {fwd_or_bkd}: compare {version_a} res with {version_b} failed in {dtype} dtype,\n'.format(
api=api,
eager_or_static_mode=eager_or_static_mode,
fwd_or_bkd=fwd_or_bkd,
version_a=version_a,
version_b=version_b,
dtype=dtype,
)
+ 'max_atol value, {version_a}_value: {value_a}, {version_b}_value: {value_b},\n'.format(
version_a=version_a,
value_a=str(np_a_flatten[max_atol_idx].item()),
version_b=version_b,
value_b=str(np_b_flatten[max_atol_idx].item()),
)
+ 'max_rtol value , {version_a}_value: {value_a}, {version_b}_value: {value_b},\n'.format(
version_a=version_a,
value_a=str(np_a_flatten_nonzero[max_rtol_idx].item()) if max_rtol_idx < len(np_a_flatten_nonzero) else '',
version_b=version_b,
value_b=str(np_b_flatten_nonzero[max_rtol_idx].item()) if max_rtol_idx < len(np_b_flatten_nonzero) else '',
)
),
)
def np_assert_staility(
np_actual,
np_baseline,
dtype,
version,
eager_or_static_mode,
fwd_or_bkd,
api,
):
max_atol_idx = np.argmax(np.abs(np_actual - np_baseline))
np_actual_flatten = np_actual.flatten()
np_baseline_flatten = np_baseline.flatten()
sub_res = np_actual_flatten - np_baseline_flatten
nonzero_idx = np.nonzero(np_baseline_flatten)
sub_res = sub_res.take(nonzero_idx)
np_baseline_flatten_nonzero = np_baseline_flatten.take(nonzero_idx).flatten()
if sub_res.size == 0:
max_rtol_idx = 0
else:
np_actual_flatten_nonzero = np_actual_flatten.take(nonzero_idx).flatten()
max_rtol_idx = np.argmax(np.abs(sub_res / np_baseline_flatten_nonzero))
np.testing.assert_equal(
np_actual,
np_baseline,
err_msg=(
'{eager_or_static_mode} {fwd_or_bkd}: {version} is unstable in {dtype} dtype,\n'.format(
eager_or_static_mode=eager_or_static_mode,
fwd_or_bkd=fwd_or_bkd,
version=version,
dtype=dtype,
)
+ 'max_atol value, {version}_value: {actual_value}, {version}_baseline_value: {baseline_value}, \n'.format(
version=version,
actual_value=str(np_actual_flatten[max_atol_idx].item()),
baseline_value=str(np_baseline_flatten[max_atol_idx].item()),
)
+ 'max_rtol value, {version}_value: {actual_value}, {version}_baseline_value: {baseline_value}, \n'.format(
version=version,
actual_value=str(np_actual_flatten_nonzero[max_rtol_idx].item()),
baseline_value=str(np_baseline_flatten_nonzero[max_rtol_idx].item()),
)
),
)
def rotate_half(x):
x1, x2 = x.chunk(2, dim=-1)
return torch.cat((-x2, x1), dim=-1)
## half模式下前向计算逻辑
def apply_rotary_pos_emb(x, cos, sin):
return x * cos + rotate_half(x) * sin
##Paddle 目前kernel中的反向计算逻辑
def paddle_backward_rotary_pos_emb(dL_dxprime, cos, sin):
return dL_dxprime * cos - rotate_half(dL_dxprime) * sin
##正确的反向计算逻辑,可以和torch自动微分的结果对齐
def correct_backward_rotary_pos_emb(dL_dxprime, cos, sin):
return dL_dxprime * cos - rotate_half(dL_dxprime * sin)
from typing import Optional
def torch_fused_rotary_position_embedding2(
q: torch.Tensor,
k: Optional[torch.Tensor] = None,
v: Optional[torch.Tensor] = None,
sin: Optional[torch.Tensor] = None,
cos: Optional[torch.Tensor] = None,
position_ids: Optional[torch.Tensor] = None,
use_neox_rotary_style: bool = True,
time_major: bool = False,
rotary_emb_base: float = 10000.0,
) -> tuple[torch.Tensor, Optional[torch.Tensor], Optional[torch.Tensor]]:
qn = apply_rotary_pos_emb(q,cos,sin)
kn = apply_rotary_pos_emb(k,cos,sin)
vn = apply_rotary_pos_emb(v,cos,sin)
return qn, kn, vn
def torch_fused_rotary_position_embedding(
q: torch.Tensor,
k: Optional[torch.Tensor] = None,
v: Optional[torch.Tensor] = None,
sin: Optional[torch.Tensor] = None,
cos: Optional[torch.Tensor] = None,
position_ids: Optional[torch.Tensor] = None,
use_neox_rotary_style: bool = True,
time_major: bool = False,
rotary_emb_base: float = 10000.0,
) -> tuple[torch.Tensor, Optional[torch.Tensor], Optional[torch.Tensor]]:
from typing import Optional
def _deal_qkv_pytorch(init_value: Optional[torch.Tensor]) -> Optional[torch.Tensor]:
if init_value is None:
return None
return init_value.permute(0, 2, 1, 3)
def _mult_qkv_pytorch(
value: Optional[torch.Tensor],
cos_tensor: torch.Tensor,
sin_tensor: torch.Tensor,
) -> Optional[torch.Tensor]:
if value is None:
return None
rotate_half_q = torch.stack([-value[..., 1::2], value[..., 0::2]], dim=-1).reshape(value.shape)
query = value * cos_tensor + rotate_half_q * sin_tensor
return query
def _mult_qkv_rotate_half_pytorch(
value: Optional[torch.Tensor],
cos_tensor: torch.Tensor,
sin_tensor: torch.Tensor,
) -> Optional[torch.Tensor]:
if value is None:
return None
head_dim = value.shape[-1]
half_dim = head_dim // 2
rotate_half_q = torch.cat([-value[..., half_dim:], value[..., :half_dim]], dim=-1)
query = value * cos_tensor + rotate_half_q * sin_tensor
return query
def _get_sin_cos_tensor_pytorch(
seq_len: int, head_dim: int, sign: int = 1, rotate_half: bool = False
):
pos_seq = torch.arange(0, seq_len, 1, dtype=torch.float32)
indices = torch.arange(0, head_dim, 2, dtype=torch.float32)
indices = 1 / (rotary_emb_base ** (indices / head_dim))
sinusoid_inp = pos_seq.unsqueeze(1) * indices.unsqueeze(0)
sinusoid_inp = sinusoid_inp.unsqueeze(0).unsqueeze(2)
sin_tensor = torch.zeros(1, seq_len, 1, head_dim, dtype=torch.float32)
cos_tensor = torch.zeros(1, seq_len, 1, head_dim, dtype=torch.float32)
if rotate_half:
stride = head_dim // 2
sin_tensor[..., :stride] = sign * torch.sin(sinusoid_inp)
sin_tensor[..., stride:] = torch.sin(sinusoid_inp)
cos_tensor[..., :stride] = torch.cos(sinusoid_inp)
cos_tensor[..., stride:] = torch.cos(sinusoid_inp)
else:
sin_tensor[..., 0::2] = sign * torch.sin(sinusoid_inp)
sin_tensor[..., 1::2] = torch.sin(sinusoid_inp)
cos_tensor[..., 0::2] = torch.cos(sinusoid_inp)
cos_tensor[..., 1::2] = torch.cos(sinusoid_inp)
return sin_tensor, cos_tensor
init_q, init_k, init_v = q, k, v
if time_major:
init_q = init_q.permute(1, 0, 2, 3)
if init_k is not None:
init_k = init_k.permute(1, 0, 2, 3)
if init_v is not None:
init_v = init_v.permute(1, 0, 2, 3)
head_dim = init_q.shape[3]
seq_len = init_q.shape[1]
sin_tensor, cos_tensor = sin, cos
if sin_tensor is None or cos_tensor is None:
sin_tensor, cos_tensor = _get_sin_cos_tensor_pytorch(seq_len, head_dim, rotate_half=not use_neox_rotary_style)
sin_tensor = sin_tensor.to(dtype=q.dtype, device=q.device)
cos_tensor = cos_tensor.to(dtype=q.dtype, device=q.device)
q_rope = _deal_qkv_pytorch(init_q)
k_rope = _deal_qkv_pytorch(init_k)
v_rope = _deal_qkv_pytorch(init_v)
print(sin_tensor.shape)
if position_ids is not None:
print(position_ids)
sin_tensor = sin_tensor.squeeze((0, 2))[position_ids].unsqueeze(2)
cos_tensor = cos_tensor.squeeze((0, 2))[position_ids].unsqueeze(2)
sin_tensor = sin_tensor.permute(0, 2, 1, 3)
cos_tensor = cos_tensor.permute(0, 2, 1, 3)
if use_neox_rotary_style:
query = _mult_qkv_pytorch(q_rope, cos_tensor, sin_tensor)
value = _mult_qkv_pytorch(v_rope, cos_tensor, sin_tensor)
key = _mult_qkv_pytorch(k_rope, cos_tensor, sin_tensor)
else:
query = _mult_qkv_rotate_half_pytorch(q_rope, cos_tensor, sin_tensor)
value = _mult_qkv_rotate_half_pytorch(v_rope, cos_tensor, sin_tensor)
key = _mult_qkv_rotate_half_pytorch(k_rope, cos_tensor, sin_tensor)
r_query = _deal_qkv_pytorch(query)
r_key = _deal_qkv_pytorch(key)
r_value = _deal_qkv_pytorch(value)
if time_major:
r_query = r_query.permute(1, 0, 2, 3)
if r_key is not None:
r_key = r_key.permute(1, 0, 2, 3)
if r_value is not None:
r_value = r_value.permute(1, 0, 2, 3)
return r_query, r_key, r_value
def print_matrix(name, arr, precision=5):
import numpy as np
np.set_printoptions(precision=precision, suppress=True)
print(f"{name}:\n{arr}\n")
class TestFusedRotatryPositionEmbeddingCase1(unittest.TestCase):
def setUp(self):
self.init_params()
self.init_threshold()
self.init_shape()
self.generate_np_inputs_and_dout()
q_torch, k_torch, v_torch, sin_torch, cos_torch, position_id_torch, dq_torch, dk_torch, dv_torch = self.gen_torch_inputs_and_dout()
q_torch,k_torch,v_torch, torch_out_grads = self.cal_torch_res(
q_torch, k_torch, v_torch, sin_torch, cos_torch, position_id_torch, dq_torch, dk_torch, dv_torch
)
self.q_torch = q_torch.cpu().detach().numpy()
self.k_torch = k_torch.cpu().detach().numpy()
self.v_torch = v_torch.cpu().detach().numpy()
self.out_grads_torch = map_structure(
lambda x: x.cpu().detach().numpy(),
torch_out_grads,
)
torch.cuda.empty_cache()
def generate_np_inputs_and_dout(self):
self.q_np = np.random.random(size=self.q_shape).astype("float32")
self.k_np = np.random.random(size=self.q_shape).astype("float32")
self.v_np = np.random.random(size=self.q_shape).astype("float32")
self.sin_np = np.random.random(size=self.sin_shape).astype("float32")
self.cos_np = np.random.random(size=self.sin_shape).astype("float32")
self.position_id_np = np.array([[0, 1, 2, 3, 4, 5, 6, 7]]).astype("int64")
self.dq_np = np.random.random(size=self.q_shape).astype("float32")
self.dk_np = np.random.random(size=self.q_shape).astype("float32")
self.dv_np = np.random.random(size=self.q_shape).astype("float32")
def init_params(self):
self.q_dtype = "float32"
self.pos_dtype = "int64"
def init_threshold(self):
self.atol = TOLERANCE["float32"]["atol"]
self.rtol = TOLERANCE["float32"]["rtol"]
def init_shape(self):
self.q_shape = [1,8, 2, 8]
self.sin_shape = [1, 8, 1, 8]
pass
def gen_torch_inputs_and_dout(self):
q_torch = torch.tensor(self.q_np,device='cuda',requires_grad=True,dtype=convert_dtype_to_torch_type(self.q_dtype))
k_torch = torch.tensor(self.k_np,device='cuda',requires_grad=True,dtype=convert_dtype_to_torch_type(self.q_dtype))
v_torch = torch.tensor(self.v_np,device='cuda',requires_grad=True,dtype=convert_dtype_to_torch_type(self.q_dtype))
sin_torch = torch.tensor(self.sin_np,device='cuda',requires_grad=False,dtype=convert_dtype_to_torch_type(self.q_dtype))
print(sin_torch)
cos_torch = torch.tensor(self.cos_np,device='cuda',requires_grad=False,dtype=convert_dtype_to_torch_type(self.q_dtype))
print(cos_torch)
position_id_torch = torch.tensor(self.position_id_np,device='cuda',requires_grad=False,dtype=convert_dtype_to_torch_type(self.pos_dtype))
dq_torch = torch.tensor(self.dq_np,device='cuda',requires_grad=False,dtype=convert_dtype_to_torch_type(self.q_dtype))
dk_torch = torch.tensor(self.dk_np,device='cuda',requires_grad=False,dtype=convert_dtype_to_torch_type(self.q_dtype))
dv_torch = torch.tensor(self.dv_np,device='cuda',requires_grad=False,dtype=convert_dtype_to_torch_type(self.q_dtype))
return q_torch, k_torch, v_torch, sin_torch, cos_torch, position_id_torch, dq_torch, dk_torch, dv_torch
def gen_eager_inputs_and_dout(self):
q_eager = paddle.to_tensor(self.q_np,dtype=self.q_dtype)
k_eager = paddle.to_tensor(self.k_np,dtype=self.q_dtype)
v_eager = paddle.to_tensor(self.v_np,dtype=self.q_dtype)
sin_eager = paddle.to_tensor(self.sin_np,dtype=self.q_dtype)
cos_eager = paddle.to_tensor(self.cos_np,dtype=self.q_dtype)
position_id_eager = paddle.to_tensor(self.position_id_np,dtype=self.pos_dtype)
dq_eager = paddle.to_tensor(self.dq_np,dtype=self.q_dtype)
dk_eager = paddle.to_tensor(self.dk_np,dtype=self.q_dtype)
dv_eager = paddle.to_tensor(self.dv_np,dtype=self.q_dtype)
q_eager.stop_gradient = False
k_eager.stop_gradient = False
v_eager.stop_gradient = False
return q_eager, k_eager, v_eager, sin_eager, cos_eager, position_id_eager, dq_eager, dk_eager, dv_eager
def cal_torch_res(self,q_torch, k_torch, v_torch, sin_torch, cos_torch, position_id_torch, dq_torch, dk_torch, dv_torch):
q,k,v = torch_fused_rotary_position_embedding2(q_torch, k_torch, v_torch, sin_torch, cos_torch, position_id_torch,False,False)
out_grads = torch.autograd.grad([q,k,v], [q_torch, k_torch, v_torch], grad_outputs=[dq_torch, dk_torch, dv_torch])
return q,k,v, out_grads
def cal_eager_res(self,q_eager,k_eager,v_eager,sin_eager, cos_eager, position_id_eager, dq_eager, dk_eager, dv_eager):
q,k,v = paddle.incubate.nn.functional.fused_rotary_position_embedding(q_eager,k_eager,v_eager,sin_eager, cos_eager, position_id_eager,False,False)
out_grads = paddle.grad([q,k,v], [q_eager,k_eager,v_eager], grad_outputs=[dq_eager, dk_eager, dv_eager])
return q,k,v, out_grads
def test_eager_accuracy(self):
q_eager, k_eager, v_eager, sin_eager, cos_eager, position_id_eager, dq_eager, dk_eager, dv_eager= self.gen_eager_inputs_and_dout()
paddle_q, paddle_k, paddle_v, paddle_out_grads= self.cal_eager_res(
q_eager, k_eager, v_eager, sin_eager, cos_eager, position_id_eager, dq_eager, dk_eager, dv_eager
)
paddle.device.cuda.empty_cache()
out_grads_eager_np = map_structure(
lambda x: x.numpy(),
paddle_out_grads,
)
np_assert_accuracy(
paddle_q.numpy(),
self.q_torch,
self.atol,
self.rtol,
self.q_dtype,
version_a="paddle_develop",
version_b="torch",
eager_or_static_mode="eager",
fwd_or_bkd="forward",
api="paddle.fused_rotary_position_embedding",
)
np_assert_accuracy(
paddle_k.numpy(),
self.k_torch,
self.atol,
self.rtol,
self.q_dtype,
version_a="paddle_develop",
version_b="torch",
eager_or_static_mode="eager",
fwd_or_bkd="forward",
api="paddle.fused_rotary_position_embedding",
)
np_assert_accuracy(
paddle_v.numpy(),
self.v_torch,
self.atol,
self.rtol,
self.q_dtype,
version_a="paddle_develop",
version_b="torch",
eager_or_static_mode="eager",
fwd_or_bkd="forward",
api="paddle.fused_rotary_position_embedding",
)
for idx in range(len(out_grads_eager_np)):
np_assert_accuracy(
out_grads_eager_np[idx],
self.out_grads_torch[idx],
self.atol,
self.rtol,
self.q_dtype,
version_a="paddle_develop",
version_b="torch",
eager_or_static_mode="eager",
fwd_or_bkd="backward",
api="paddle._C_ops.embedding",
)
if __name__ == '__main__':
seed = 2025
torch.manual_seed(seed)
torch.cuda.manual_seed(seed)
paddle.seed(seed)
np.random.seed(seed)
unittest.main()
解决思路:
1.解决方法
结论:需要把“sin 的逐元素乘”放进旋转里用到的那一侧(配对维度)的 sin。最小改法是在发射 kernel 的地方,反向时改用“配对索引”的 sin 缓存再调用现有的 rotate_half,这样无需改 rotate_half 签名。
建议改动点(思路):
- 文件:
paddle/paddle/phi/kernels/fusion/gpu/fused_rope_utils.h - 位置:
VectorizedFusedRopeWithRotateHalfKernel(...)内,每次循环里我们现在这样做:- 先用
VectorizedGetSinCos::run(..., index, ..., sin_value, cos_value)得到当前位置index的sin_value/cos_value - 直接调用
rotate_half(ins_data, ..., sign, sin_value, cos_value, outs_data)
- 先用
- 修改为(仅当
sign==-1,即反向):- 仍然先算当前位置的
cos_value(保留) - 再额外用“配对基址”计算一份“旋转后位置”的 sin:令
stride_r = head_dim / 2index_r_base = ((index % head_dim) < stride_r) ? (index + stride_r) : (index - stride_r)- 调用
VectorizedGetSinCos::run(..., index_r_base, ..., sin_value, /*cos可忽略*/)重算 sin 到同一个sin_value缓存里
- 然后调用原来的
rotate_half(...)。这样在反向路径中,rotate_half(dL_dxprime)里乘到的就是“配对维度的 sin”,实现等价于-R(dL_dxprime ⊙ sin),从而得到 dL/dx = dL/dx' ⊙ cos − R(dL/dx' ⊙ sin)
- 仍然先算当前位置的
要点:
- 前向(sign==+1)保持不变,沿用当前位置
sin_value; - 反向(sign==-1)在调用
rotate_half前把sin_value换成配对位置的那份; - 两个分支(默认 rotary_base=kDefaultRotaryBase 与通用分支)都要做同样处理;
- 这是最小侵入改法,不改
rotate_half签名;如果愿意改签名,也可以给rotate_half增参sin_value_rot,在sign==-1时用sin_value_rot[nx]代替sin_value[nx]。
这样就把实际实现从
- 旧:
grad_x = g * cos - rotate_half(g) * sin改为 - 新:
grad_x = g * cos - rotate_half(g * sin),严格对齐数学推导与 PyTorch 自动微分。
2.详细解释
-
原来的 sin_value 是什么
- 在 kernel 里,
VectorizedGetSinCos::run(...)用“当前元素索引 index”计算出的sin_value[nx]与cos_value[nx]。也就是当前半维位置的 sin/cos,而不是“与之成对的另一半维”的 sin/cos。 - 随后
rotate_half(...)内会取- p0 = 当前半维的数据(或上游梯度 g0)
- p1 = 成对半维的数据(或上游梯度 g1,对应 index_r)
- 计算式:
result[nx] = cos_value[nx] * p0 + sign * sign_r * sin_value[nx] * p1
- 在 kernel 里,
-
为啥这会导致反向里“乘 sin 的位置不对”
- 正确的反向公式:设上游梯度 g,R=rotate_half,则
- y = x⊙cos + R(x)⊙sin
- dL/dx = g⊙cos − R(g⊙sin)
- 展开到每对二维(x0,x1):
- 正确:dx0 = g0c0 + g1s1;dx1 = g1c1 − g0s0
- 旧实现做的是:dx = g⊙cos − R(g)⊙sin
- 展开:dx0 = g0c0 + g1s0;dx1 = g1c1 − g0s1
- 可见,乘 sin 的那一项,应该是“配对维度的 sin”(s1/s0),而旧实现用的是“当前维度的 sin”(s0/s1),两者在一般情况下不相等(只有当一对维度的 sin 完全相同才凑巧一致)。
- 正确的反向公式:设上游梯度 g,R=rotate_half,则
-
为什么“把 sin_value 改为配对索引的 sin”就对了
- 在
rotate_half(...)中,p1 取自“配对半维”(index_r),而 sin 还用的是“当前半维”的 sin。这等价于 R(g) 后再逐元素乘 sin(即错位乘)。 - 我们在进入
rotate_half前,若是反向(sign == -1),先把sin_value改成“配对半维”的 sin(用get_paired_sin_values取到pos_head_r的 sin),这样sin_value[nx] * p1实际就是“配对��分量的 sin 与配对分量的 g 相乘”,实现的就是 R(g⊙sin) 中那一项。 - 于是整体变为:dL/dx = g⊙cos − rotate_half(g⊙sin),与数学推导严格一致。
- 在
-
为啥不用改 cos
- 正确公式里的 cos 项是 g⊙cos,逐元素与“当前分量”相乘即可,不涉及配对交换,所以保持
cos_value按当前索引即可。
- 正确公式里的 cos 项是 g⊙cos,逐元素与“当前分量”相乘即可,不涉及配对交换,所以保持
-
小结
- 原本:sin_value 对应“当前半维”,但在
rotate_half里与“配对半维的数据 p1”相乘,导致计算变成 g⊙cos − R(g)⊙sin。 - 修改:在反向时,把
sin_value换成“配对半维的 sin”,让sin_value[nx] * p1变成“配对分量 g1 与其对应的 sin1 相乘”,等价实现 g⊙cos − R(g⊙sin)。 - 这就是为什么“把 sin_value 换成配对索引的 sin”就对了的原因。
- 原本:sin_value 对应“当前半维”,但在
3.求导过程
回顾问题设置:
假设我们有一个二维向量 v = (x, y) ,首先进行旋转,得到新的向量 v',然后将其每个分量按元素乘以 sin(θ),得到最终结果v''。
1. 旋转操作:
首先,旋转V
2. 按元素乘以 sin(θ)
然后,按元素乘以 sin(θ):
梯度计算
假设我们要计算损失函数 相对于 的梯度,使用链式法则:
1. 计算 对 的梯度
首先,计算 v''对 v'的梯度:
这表示 v''每个分量的变化都与sin(θ)成正比。
2. 计算 v'对 v的梯度
然��后,计算v'对v的梯度:
这是因为旋转操作是线性的,分别是 和 对应的变换。
正向的时候,是一个逆时针旋转的矩阵:
3. 链式法则求梯度
现在,可以通过链式法则计算总的梯度:
其中,注意到在链式法则中,梯度传播的顺序很重要。在每个步骤中,sin(θ)会“携带”在旋转的梯度中,所以每个梯度的传播都需要包含sin(θ)。
4.为什么之前的单测能正常运行
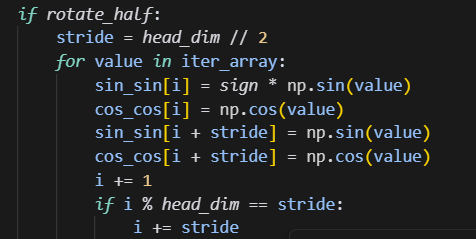
rotate_half为True时,正确的计算顺序如下:
![]()
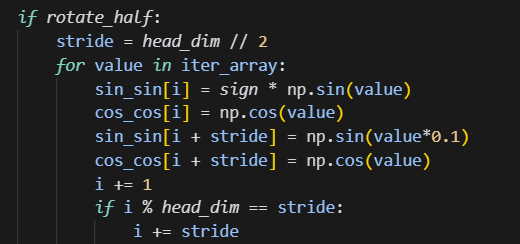
而实际计算顺序是:
![]()
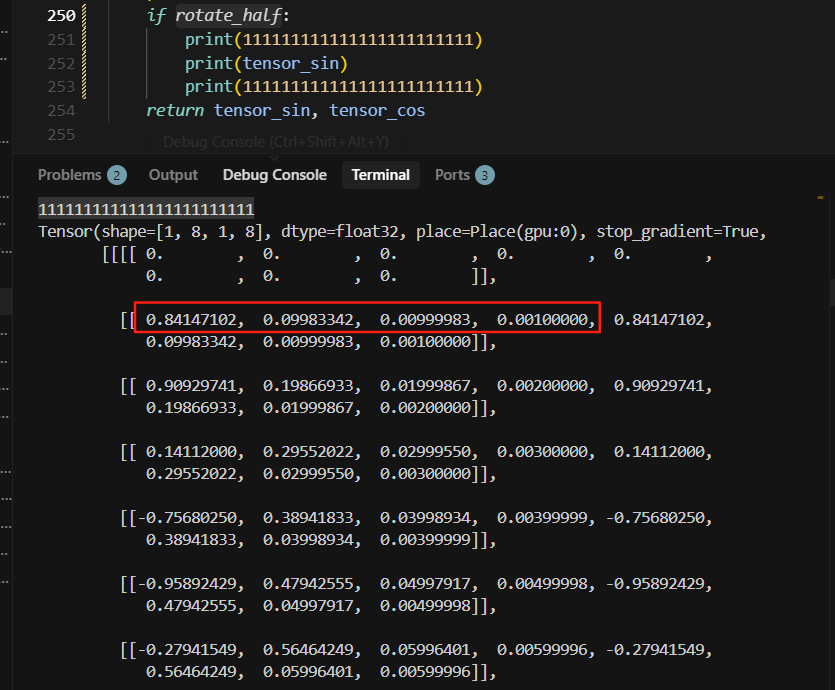
但是旧的单测,rotate_half为True时,前半部分的sin数据和后半部分的sin数据是一致的,此时s1和s0二者相等,所以跑出来的数据也相等了。
验证事实性:
修改如下:
原来的逻辑测试结果:
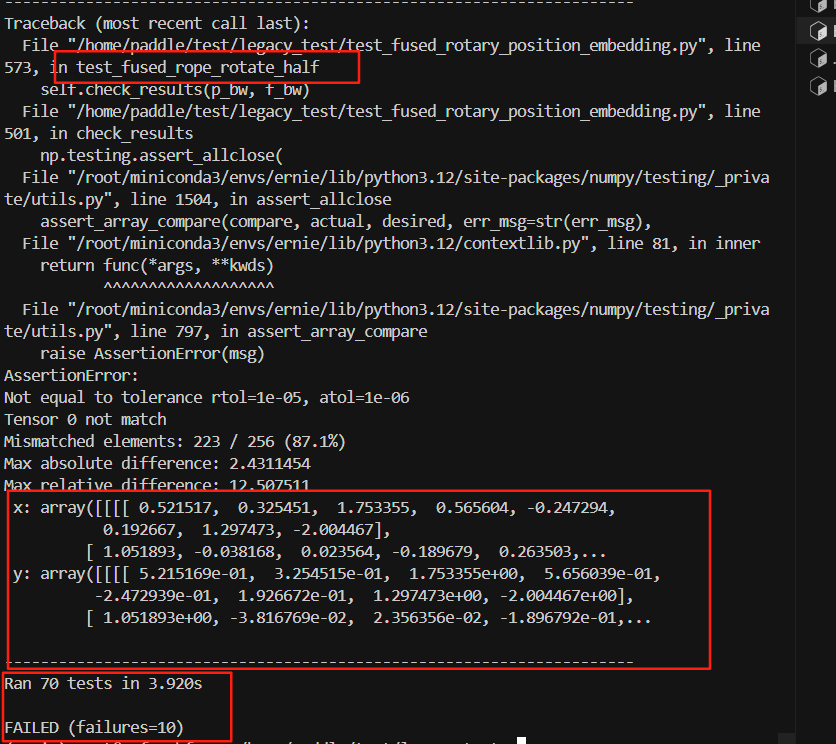
现在的逻辑测试结果: